AGV模式的堆垛机的AGV模块
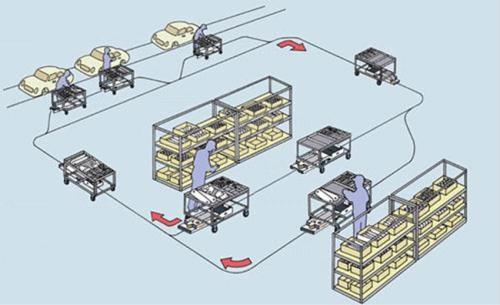
AGV模式的堆垛机的AGV模块,包括控制系统、壳体、设于壳体内的电池箱、设于壳体底部的驱动总成、设于驱动总成前方的磁导航传感器组件、设于壳体底部驱动总成前方的RFID传感器、设于壳体前方的激光扫描避障传感器、设于壳体底部与驱动总成连接的提升组件,驱动总成、磁导航传感器组件、RFID传感器、激光扫描避障传感器及升组件与控制系统电连接;与现有技术相比,本实用新型的AGV模式的堆垛机的AGV模块,实现高精度的磁导航自动输送,同时在输送过程中可以识别障碍和地标卡,并在堆垛机需要检修,可以使驱动总成离开地面,不用一下堆垛机即可进行检修。
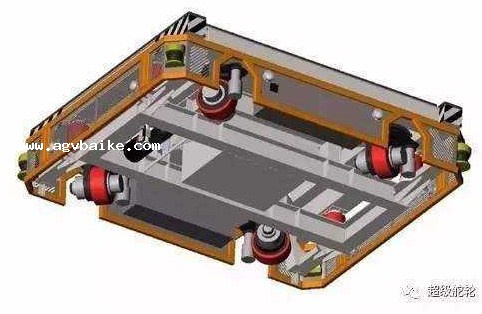
AGV模式的堆垛机的AGV模块,其特征在于:AGV模式的堆垛机的AGV模块包括控制系统、壳体、设于壳体内的电池箱、设于壳体底部的驱动总成、设于驱动总成前方的磁导航传感器组件、设于壳体底部驱动总成前方的RFID传感器、设于壳体前方的激光扫描避障传感器、设于壳体底部与驱动总成连接的提升组件,驱动总成、磁导航传感器组件、RFID传感器、激光扫描避障传感器及提升组件与控制系统电连接;壳体底部设有用于支撑整个AGV模块及在驱动总成的带动下移动及转向的万向轮;驱动总成包括行走机构、衔接架和托架,衔接架与行走机构连接,托架与衔接架弹性连接,托架的上方设有用于与壳体连接的法兰,提升组件设于托架上;行走机构包括驱动架、设于驱动架两侧并分别连接各自独立设置的驱动组件的驱动轮,驱动架与衔接架连接;提升组件包括通过转座设于托架上的提升转轴、设于提升转轴两端的提升臂、通过提升座设于托架上且与提升转轴传动连接的提升电机,衔接架上设有与提升臂适配的承拉板;控制系统可在磁导航传感器组件的信号传递中控制行走机构按照磁轨道移动、在激光扫描避障传感器的信号传递中控制行走机构带动壳体旋转避障、在RFID传感器的信号中识别地标卡、并在堆垛机需要维修时在提升组件的作用下使行走机构离开地面。
本文地址:http://www.agvbaike.com/AGVjishu/2019-09-20/6783.html
agv
AGV知识
AGV资料
AGV资讯
AGV技术
AGV应用
AGV方案
仓储机器人
免责声明:本文引自厂商或其他媒体,与AGV百科网无关。其原创性以及文中陈述文字和内容未经本站证实,对本文以及其中全部或者部分内容、文字的真实性、完整性、及时性本站不作任何保证或承诺,请读者仅作参考,并请自行核实相关内容!
相关阅读
- AGV与RGV的技术对比2021-04-29
- 浅谈AGV小车市场及其导航和传感器技术应用2020-09-27
- AGV小车的激光雷达安装位置修正方法2019-09-24
- 多点稳固结构的AGV小车驱动及转向系统2019-09-24
- AGV模式的堆垛机的AGV模块2019-09-20