AGVЕФЙиМќММЪѕНтЮі
ЖдгкЪЕгУаЭAGVаЁГЕРДЫЕЃЌЖдЕМКНТЗОЖИњзйЕФзМШЗадЁЂЦНЮШадКЭЖдЦЋВюОРе§ЕФПьЫйадЪЧЬхЯжЫќЕФадФмЕФживЊжИБъЁЃAGVНсЙЙЩшМЦМАПижЦЦїЕФПЊЗЂЫЎЦНЪЧБЃжЄетвЛжИБъЕФЙиМќЁЃЮЊБЃжЄAGVАДееИјЖЈТЗОЖЦНЮШПьЫйЕФааЪЛЃЌашвЊЖдAGV змЬхЛњЙЙЃЌвдМАЖдAGVПижЦЦїЕФШэМўКЭгВМўЯЕЭГНјааЩшМЦгыПЊЗЂЃЌВЂНјааAGV ЯрЙиЪЕбщбаОПЁЃ
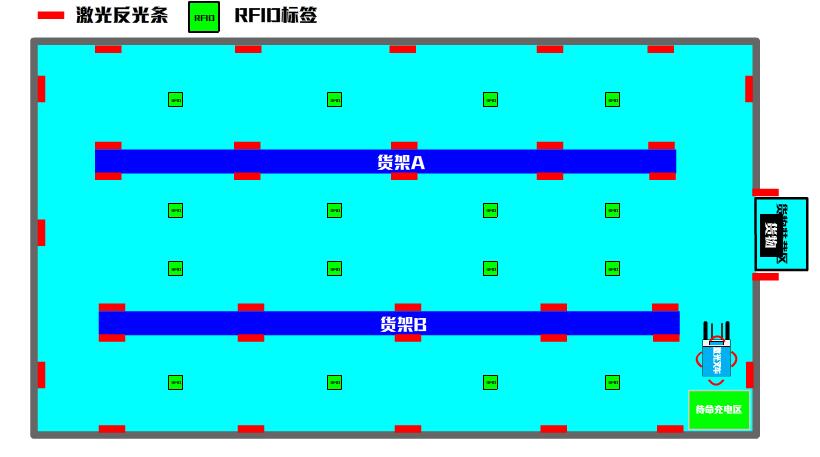
ЮЊЪЙAGVаЁГЕГЩЙІЕиЭъГЩвЛЯюШЮЮёЃЌзюжївЊЕФЪЧШчКЮЪЙаЁГЕдкИДдгЕФЛЗОГжавдНЯаЁЕФДњМлЕНДяФПЕФЕиЁЃетОЭЩцМАЕНШчЯТМИИіЮЪЬтЕФНтОіЃЌМД
1) ШчКЮДгЛЗОГжаЕУЕНAGVаЁГЕжмЮЇЕФеЯАЮяаХЯЂМАЦфЫќЯрЙиаХЯЂЁЃ
2) ШчКЮИљОнФкВПМАЭтВПДЋИаЦїРДЛиД№аЁГЕЕБЧАДІгкЛЗОГжаЕФЪВУДЮЛжУЁЃ
3) ШчКЮИљОнаЁГЕЕФЕБЧАЮЛжУКЭЕБЧАаХЯЂШЗЖЈааЖЏВпТдЁЃ
4) ШчКЮВњЩњКЯЪЪЕФЧ§ЖЏаХКХЪЙаЁГЕдЫЖЏдкдЄЖЈЕФЙьМЃЩЯЁЃ
етЫФИіЮЪЬтЕФНтОіЖдгкдкЪЕЪБЛЗОГжадЫЖЏЕФаЁГЕРДЫЕЪЧШБвЛВЛПЩЕФЃЌгыДЫЯрЖдгІЕФММЪѕМДЮЊДЋИаЦїММЪѕЁЂздЖЈЮЛММЪѕЁЂЙцЛЎОіВпММЪѕКЭдЫЖЏПижЦММЪѕЁЃЖдAGVЖјбдЃЌЪЕЪБЁЂАВШЋЁЂЮоХізВЕиЭъГЩИїЯюШЮЮёЃЌЪЧЫќзюЛљБОЕФЙІФмЁЃдкЮДжЊЛЗОГжазджїЕМКНгыБмеЯЖдИїжжЛњЦїШЫРДЫЕЖМОпгаживЊЕФвтвхЃЌвђДЫПЊЗЂ ОпгаИпЖШЕФздЙцЛЎЁЂздзщжЏЁЂздЪЪгІФмСІЁЂЪЪКЯгкИїжжИДдгЕФЗЧНсЙЙЛЗОГЙЄзїЕФзджїЪНAGVЯЕЭГвЛжБЪмЕНбаОПепЕФжиЪгЃЌЖјЧвОпгаЙуРЋЕФгІгУЧАОАЃЌЯждквбОГЩЮЊИїЙњПЦбаШЫдБбаОПЕФжиЕуСьгђЁЃ
БОЮФЕижЗЃК/AGVjishu/5950.html
agv
AGVжЊЪЖ
AGVзЪСЯ
AGVзЪбЖ
AGVММЪѕ
AGVгІгУ
AGVЗНАИ
ВжДЂЛњЦїШЫ
Утд№ЩљУїЃКБОЮФв§здГЇЩЬЛђЦфЫћУНЬхЃЌгыAGVАйПЦЭјЮоЙиЁЃЦфдДДадвдМАЮФжаГТЪіЮФзжКЭФкШнЮДОБОеОжЄЪЕЃЌЖдБОЮФвдМАЦфжаШЋВПЛђепВПЗжФкШнЁЂЮФзжЕФецЪЕадЁЂЭъећадЁЂМАЪБадБОеОВЛзїШЮКЮБЃжЄЛђГаХЕЃЌЧыЖСепНізїВЮПМЃЌВЂЧыздааКЫЪЕЯрЙиФкШн!
ЯрЙидФЖС
- AGVгыRGVЕФММЪѕЖдБШ2021-04-29
- ЧГЬИAGVаЁГЕЪаГЁМАЦфЕМКНКЭДЋИаЦїММЪѕгІгУ2020-09-27
- AGVаЁГЕЕФМЄЙтРзДяАВзАЮЛжУаое§ЗНЗЈ2019-09-24
- ЖрЕуЮШЙЬНсЙЙЕФAGVаЁГЕЧ§ЖЏМАзЊЯђЯЕЭГ2019-09-24
- AGVФЃЪНЕФЖбЖтЛњЕФAGVФЃПщ2019-09-20