于海斌:脱离实际想创新没价值 机器人技术和商业模式待突破
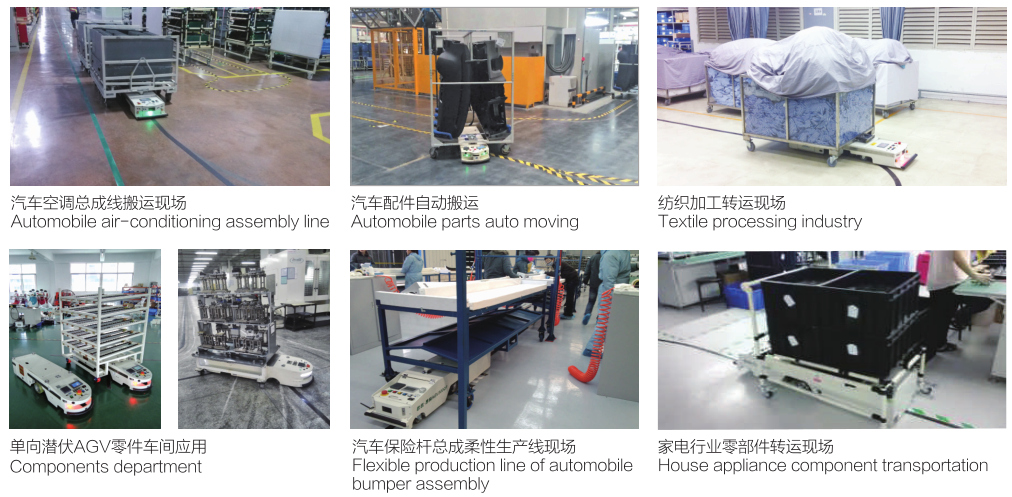
对于机器人在制造业中的应用,于海斌认为,从制造过程的角度,按目前的自动化水平和效率来看,未来还有很大的提升空间。
2016年世界机器人大会于10月20日-25日在京召开,中国科学院沈阳自动化研究所所长于海斌在会议期间接受中国网科技采访时表示,对于如何在未来促进机器人行业的发展,除了构建“产学研”一体的创新生态环境之外,中国还需要在机器人的技术和商业模式方面取得突破。
于海斌认为,研究机构、高校、企业等各个创新单元,应该把各自的核心工作做好,同时社会层面需要有一种统筹整合的力量,建立一种创新生态环境。以沈阳自动化研究所自身的工作为例,于海斌介绍,研究所从事的前沿技术的研发一定是将来在基层环境中可以发挥作用的;同时沈阳自动化所还有一大部分精力是用于攻克核心关键技术。“不能脱离实际,脱离一个实际系统天天去想创新是没有价值的,”于海斌称,“了解需求后,在如何实现需求方面发挥科学家的想象力。”
于海斌表示,科技成果转化是一个经济和社会相结合的复杂命题,一方面应该鼓励科研人员将成果产业化,特别是对于高新技术的初创企业,但后续一定需要有一种市场整合的力量。
于海斌还表示,除了构建“产学研”一体的创新生态环境之外,中国还需要在机器人的技术和商业模式方面取得突破。
对于机器人在制造业中的应用,于海斌认为,从制造过程的角度,按目前的自动化水平和效率来看,未来还有很大的提升空间。他预计,未来3-5年,我国制造业工厂的自动化水平会有一个质的飞跃。