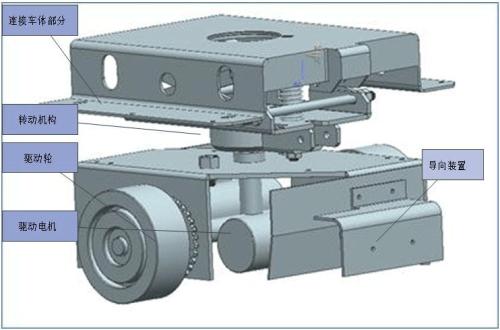
AGV的导引原理
AGV的导引方式是一门不断发展的技术。目前,大部分是采用光学加电脑导引技术。下一步的方式将是自行导引,这也是AGV的最高级的导引方式。AGV的转向方式有两种,一种是采用差速转向控制,目前军用坦克就是采用这种方式。它是将一边的轮子的速度比另一边的速度快,这样产生了转向效果;车前方两测装有传感器,探测转向信号,车辆上的幅度探测器对根据两边的信号大小来决定转向幅度。
AGV另一种转向方式是方向盘转向方式,这种方式的车通常只有一个前轮,沿着铺设的导向条的路径前进。当探测到相位差时,车辆就产生转向动作来补偿这个差值。这种车通常用在装配线车、牵引车、单载车、货架车以及叉车和轻载车。而差速转向装置只能用在装配线车、单载车、叉车和轻载车上,不同用于牵引车和可以手动的车辆,如货架车。
随着人们对生产效率的要求提高,对AGV的需求也越来越大,AGV的技术也会越来越广泛地得到应用。
本文地址:http://www.agvbaike.com/agvzhishi/5021.html
agv
AGV知识
AGV资料
AGV资讯
AGV技术
AGV应用
AGV方案
仓储机器人
免责声明:本文引自厂商或其他媒体,与AGV百科网无关。其原创性以及文中陈述文字和内容未经本站证实,对本文以及其中全部或者部分内容、文字的真实性、完整性、及时性本站不作任何保证或承诺,请读者仅作参考,并请自行核实相关内容!
相关阅读
- AGV仓储机器人回转驱动装置2019-09-25
- 用于AGV防爆小车行走轮毂系统2019-09-24
- AGV小车避震悬挂装置介绍2019-09-20
- 物联网的智能工厂AGV自动运输平台2019-09-20
- 智能仓储机器人及其工作方法2019-09-19