头条 物联网的智能工厂AGV自动运输平台
物联网的智能工厂AGV自动运输平台,包括万向轮、搬运槽、固定结构、支撑架、限位结构、驱动结构和...[详情]

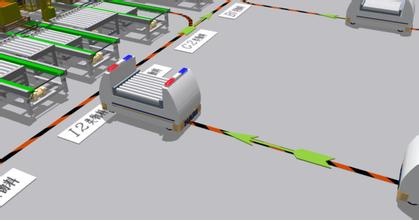
AGV小车工作原理概述
AGV工作原理: 当接收到物料搬运指令后,控制器系统就根据所存储的运行地图和AGV小车当前位置及行驶方向进行计算、规划分析,选择最佳的行驶路线,自动控制AGV小车的行驶和转向,当AGV到达装载货物位置并准确停位后,移载机构动作,完成装货过程。然后AGV小车起动,驶向目标卸货点,准确停位后,移载机构动作,完成...[详细]
AGV小车主要类型划分
AGV小车主要类型的划分,目前业内公认的划分方式有3种,即:导航方式、驱动方式和移载方式。一、按导航方式划分 1、磁导航AGV小车 2、激光导航AGV小车 3、拟人导航AGV小车 4、惯性导航AGV小车 5、电磁导航AGV小车 6、光学导航AGV小车 7、视觉导航AGV小车 8、GPS导航AGV...[详细]

浅谈AGV搬运机器人的类型差异
当下国内同质化竞争激烈和人力成本高企,特别是摆在制造型企业面前主要任务的就是成本和品质。企业面对人力成本的提高唯一方法是提高有效劳动生产力,也就是提高生产自动化的程度,因此各种机器人的需求也越来越迫切,AGV物流机器人的使用也渐渐普及,应用遍及各行各业,如:传统生产物料运输、柔性装配线、加工线等。 国内外A...[详细]
制造业自动化必须了解的几个术语
控制 系统的第一代产生于1930年到1940年,主要代表是以基地式仪表为代表的机械控制技术。第二代产生于1950年,主要是电气控制技术为主的继电器控制技术和调节器为代表的模拟控制技术。目前所称的控制系统是第三代控制系统,诞生于二十世纪七十年代,主要技术代表是用于流程工业的集散控制系统(DCS)和用于离散工业的...[详细]
AGV系统的组成及各部分的作用
曾有国外专家对AGV控制系统需解决的主要问题做了恰当的比喻:Where am I? (我在哪里?)Where am I going?(我要去哪里?) How can I get there?(我怎么去?),这三个问题归纳起来分别就是AGV控制系统中的三个主要技术:AGV的导航(Navigation),AGV的...[详细]
AGV按通讯方式分类
5.1 有线通讯 可利用导引线实现载波通讯,布线隐蔽,不易污损。主要用于电磁导引、简单路径和区域不大的场合。5.2 红外光通讯 没有频率许可问题,通讯速度高,容易控制,通讯区须在清晰可见范围,需要机械防护,对灰尘敏感,受其它光源及相同波长红外线的干扰。适用于简单路径、没有遮挡和区域不大的场合。多用于电磁导...[详细]
AGV按充电方式分类
1 自动充电 当AGV需要补充电力时,会自动报告并请求充电,由地面控制中心指挥,驶向指定充电区或台位,车载充电连接器与地面充电系统自动连接并实施充电。充电完成后AGV自动脱离充电系统,驶向工作区或待命区投入正常运行。其特点是整个充电过程全部实现自动化、智能化,无需专人看管。自动充电AGV适用于工作周期长,车...[详细]
AGV按移载方式分类
3.1 推挽式 AGV装卸货物通过自身的推挽机构与地面的无动力辊道站台实现。作业时,AGV停靠在站台侧边,通过推挽机构左、右侧向移动伸臂推拉完成装卸货物,货物在AGV辊道与地面站台辊道之间滚动,载荷转移巧妙,地面站台不需要连锁信号和动力传动,适合同高度站台之间的搬运场合。但对作业点的定位精度以及与移载系统关...[详细]
精选文章
-
机器人产业需求将爆发 工业生产或步入高自动化
2016-11-02 15:44
-
实力老牌与新秀黑马同台分羹各有招数共赢AGV市场
2016-11-02 17:15
-
AGV从负载方式方面分大致有几种?
2016-11-02 14:44
-

卡尔玛赢得18台全电动自动化引导车(AGV)重大订单
2016-11-02 17:16
-

AGV行业正站在风口上
2017-11-16 15:58
热门文章
猜你喜欢
-
东南亚自动化市场仍大有可为
2016-11-02 15:44
-

2017机器人行业投资热再继续,一二月融资、并购、IPO全梳理
2017-03-23 17:38
-
AGV小车停止位置计算
2016-11-02 17:57
-
动力源是什么?
2016-11-02 14:44
-

昆船公司首个AGV系统出口项目通过验收
2016-11-02 17:18