头条 物联网的智能工厂AGV自动运输平台
物联网的智能工厂AGV自动运输平台,包括万向轮、搬运槽、固定结构、支撑架、限位结构、驱动结构和...[详情]
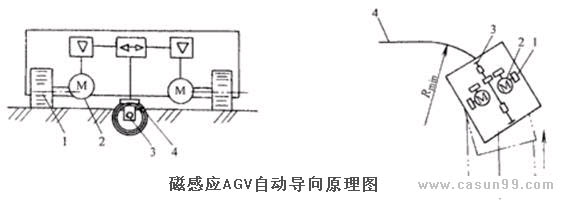
磁感应AGV自动导向原理图
AGV的自动导向小车底部装有弓形天线3,跨设于以感应导线4为中心且与感应线垂直的平面内。感应线通以交变电流,产生交变磁场。当天线3偏离感应线任何一侧时,天线的两对称线图中感应电压有差值,误差信号经过放大,驱动左、右电动机2,左右电动机有转速差,经驱动轮1使小车转向,使感应线重新位于天线中心,直至误差信号为零。...[详细]

AGV运行环境的安全防护措施
AGV运行环境的安全防护措施 2.1 应安全行走的需要,在AGV运行路径上,考虑使用警报、标志、信号、色彩、安全杆等警示物,以确保安全。 2.2 为了防止与人、周围设施相撞,根据需要可考虑设置相应的防撞装置。 2.3 AGV在与站台、自动门、电梯等设施进行连动的场合,要系统地考虑方方面面的联动因素,使其...[详细]
AGV行走系统的驱动装置
AGV行走系统的驱动装置 AGV小车采用差速转向控制,故每个驱动轮都有独立的驱动电机。为了使系统运行可靠且维护方便,本系统采用两个无刷直流电机作为驱动电机。同时,为了安装、操作方便,选用了低速性能较好的外转子无刷电机,将其外转子直接作为车轮,且无需配备减速机构。 根据AGV小车所要承载的负荷、系统的自重以及车...[详细]
AGV自动搬运车的特点
AGV自动搬运车的特点 1、AGV自动搬运车运行路径和目的地可以由管理程序控制,机动能力强。而且某些导向方式的线路变更十分方便灵活,设置成本低。 2、工位识别能力和定位精度高,具有与各种加工设备协调工作的能力。AGV自动搬运车在通讯系统的支持和管理系统的调度下,可实现物流的柔性控制。 3、AGV自动搬运...[详细]
AGV无人搬运车控制系统
AGV无人搬运车控制系统类似于机器人控制器,用以对AGV无人搬运车进行监控。控制器计算机通过通信系统从地面站接受指令并报告自己的状态。通常控制器可完成以下工作:手动控制、安全装置启动、蓄电池状态、转向极限、制动器解脱、行走灯光、驱动和转向电机控制和充电接触器等。某些AGV无人搬运车具有编程能力,允许小车离开导...[详细]
AGV小车应该注意哪些事项?
AGV小车应该注意哪些事项?1、AGV小车使用环境:包括静态环境和动态环境; 静态环境:是指AGV小车运行路线周围恒态的环境,包括车间柱子,设备,噪音及电磁干扰等。它影响到AGV小车行走路径的选择及AGV小车的稳定性。 动态环境:是指AGV小车运行环境中随时间变化在不断改变的环境,如:物流车,搬运车,运动中的...[详细]
AGV红外系统寻迹原理
AGV红外系统寻迹原理原理一:AGV自动导引车采用发光二极管发光,用光敏二极管接收。 当发光二极管发出的可见光照射到黑带时,光线被黑带吸收,光敏二极管为检测到信号,呈高阻抗,使输出端为低电平。当发光二极管发出的可见光照射到地面时,它发出的可见光反射回来被光敏二极管检测到,其阻抗迅速降低,此时输出端为高电平。但...[详细]

AGV搬运车蓄电池产品特点
AGV搬运车蓄电池产品特点1.可靠性高AGV搬运车蓄电池的极板组装配方式、蓄电池化成等技术全部借鉴我公司航空镉镍蓄电池的核心技术,采用良好导电性材料,降低了充放电时的温升,提高了AGV搬运车蓄电池的可靠性。2.快充性能佳AGV搬运车蓄电池大电流充电接受能力强,最大可接受3ItA的电流充电。3.充放电效率高、补...[详细]
AGV小车路径行走说明
AGV小车路径行走说明AGV小车直线路径行走 用于主干道上小车长直线路径的快速行走,赢得时间。其结束条件是检测到有弯道。AGV小车特殊路径的行走 用于特殊路径的慢速前进,如在AGV小车的行走中,由于导航白线折弯,前置传感器丢失了白线,AGV小车减速行走,当中置传感器检测到白线后,根据时间的长短来判定,令AGV...[详细]
精选文章
-
机器人产业需求将爆发 工业生产或步入高自动化
2016-11-02 15:44
-
实力老牌与新秀黑马同台分羹各有招数共赢AGV市场
2016-11-02 17:15
-
AGV从负载方式方面分大致有几种?
2016-11-02 14:44
-

卡尔玛赢得18台全电动自动化引导车(AGV)重大订单
2016-11-02 17:16
-

AGV行业正站在风口上
2017-11-16 15:58
热门文章
猜你喜欢
-
东南亚自动化市场仍大有可为
2016-11-02 15:44
-

2017机器人行业投资热再继续,一二月融资、并购、IPO全梳理
2017-03-23 17:38
-
AGV小车停止位置计算
2016-11-02 17:57
-
动力源是什么?
2016-11-02 14:44
-

昆船公司首个AGV系统出口项目通过验收
2016-11-02 17:18