AGV机器人常用传感器及相关技术
移动机器人是机器人的重要研究领域,人们很早就开始移动机器人的研究。世界上第一台真正意义上的移动机器人是斯坦福研究院(SRI)的人工智能中心于1966年到1972年研制的,名叫Shakey,它装备了电视摄像机、三角测距仪、碰撞传感器、驱动电机以及编码器,并通过无线通讯系统由二台计算机控制,可以进行简单的自主导航。Shakey的研制过程中还诞生了两种经典的导航算法:A*算法(theA*searchalgorithm)和可视图法(thevisibilitygraphmethod)。虽然Shakey只能解决简单的感知、运动规划和控制问题,但它却是当时将AI应用于机器人的最为成功的研究平台,它证实了许多通常属于人工智能(AritificialIntelligence,AI)领域的严肃的科学结论。从20世纪70年代末开始,随着计算机的应用和传感技术的发展,以及新的机器人导航算法的不断推出,移动机器人研究开始进入快车道。

本文地址:/AGVjishu/2016-11-09/6398.html
agv
AGV知识
AGV资料
AGV资讯
AGV技术
AGV应用
AGV方案
仓储机器人
免责声明:本文引自厂商或其他媒体,与AGV百科网无关。其原创性以及文中陈述文字和内容未经本站证实,对本文以及其中全部或者部分内容、文字的真实性、完整性、及时性本站不作任何保证或承诺,请读者仅作参考,并请自行核实相关内容!
相关阅读
- AGV与RGV的技术对比2021-04-29
- 浅谈AGV小车市场及其导航和传感器技术应用2020-09-27
- AGV小车的激光雷达安装位置修正方法2019-09-24
- 多点稳固结构的AGV小车驱动及转向系统2019-09-24
- AGV模式的堆垛机的AGV模块2019-09-20

热门文章









精选文章
-
agv当在转弯时,障碍物传感器在转弯时可能会感应到两边的物体。你们是怎么解决?
2016-11-02 14:43
-

杨文华:AGV技术发展综述
2016-11-02 17:17
-

机器人技术专利概况
2016-11-02 17:32
-
日法科学家打造脑控机器人 阿凡达或将成真
2016-11-02 15:44
-
AGV搬运机器人在柔性制造系统中的作业流程分析
2016-11-02 15:43
-
AGV自动导引小车技术特点
2016-11-02 14:42
-

德马泰克宣布收购NDC自动化
2016-11-02 17:17
-
全自动agv机器人叉车产品概述
2016-11-02 17:56
猜你喜欢
-

AGV――为什么您需要将叉车改装成AGV
2016-11-02 17:16
-
AGV的寿命?
2016-11-02 14:43
-

智能AGV系统在报业的应用
2016-11-02 17:17
-
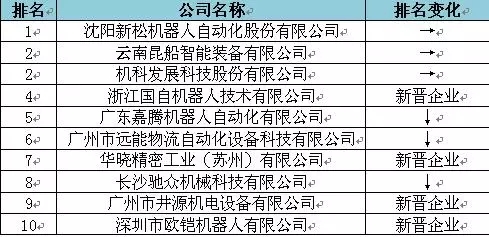
2015年中国移动机器人(AGV)产值10强企业
2016-11-02 17:16
-

CeMAT ASIA 2016亚洲国际物流展部分展商预览
2016-11-02 17:15
-

仓储物流机器人或将成为下一风口
2017-08-01 17:04
-

工业机器人成电子产品精致化推手
2016-11-02 15:43
-
AGV 的关键技术及发展概况
2016-11-02 16:54