国内外AGV导航控制技术
导引控制技术是AGV的核心技术,采用不同的导引方式就形成了各种形式的AGV
(1)电磁导引
在 AGV 要行驶的路线地而之下,预先理设好导引线。当给导引线通以一定频率的交流电流后,在导引线周围产生交变电磁场。AGV 上的探测线圈就能够检测此电磁场并使 AGV 沿着导引线方向运动。当探测线圈偏离导引线时,两个线圈中的感应电压就有差异,车载控制系统就能根据电压差驱动转向电机,使 AGV 回到正确的路径上。
(2)磁条导引
这种方式和电磁导引比较类似,只是把导引线换成磁条,在两个探测线圈之外多加了个激励线圈。因为磁条的磁场是不变的,探测线圈中不能自动感应出电压。
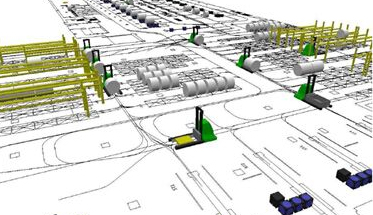
(3)激光导引
在 AGV 行驶路径周围预先垂直设置好一系列反光板,AGV 上装的激光扫描器不断扫描周围环境,当扫描到反光板时,扫描器就能感知。只要扫描到三个以上的反光板,就可以根据反光板的坐标值以及各反光板的法线和纵向轴的夹角,由控制器计算出 AGV 当前的全局坐标系中的坐标,以及行驶方向与 X 轴的夹角,达到准确定位和定向。
(4)惯性导航
AGV 上装有陀螺仪,小车在行驶时有个基准方位,用陀螺仪测量加速度,并将陀螺仪的坐标值和加速度换算成 AGV 当前的坐标和方向,将它们和规定的路线相比较。当 AGV 偏离规定路径时,测得的加速度值和规定值就有一个矢量差,对这个差进行二次积分就能得到偏差值,并作为纠正小车行驶方向的依据。
(5)GPS(全球定位系统)导航
通过卫星对非固定路面系统中的控制对象进行跟踪和导航,目前此项技术还在发展和完善,通常用于室外远距离的跟踪和导航,其精度取决于卫星在空中的定点水平及控制对象周围环境等因索。
本文地址:/AGVjishu/5179.html
agv
AGV知识
AGV资料
AGV资讯
AGV技术
AGV应用
AGV方案
仓储机器人
免责声明:本文引自厂商或其他媒体,与AGV百科网无关。其原创性以及文中陈述文字和内容未经本站证实,对本文以及其中全部或者部分内容、文字的真实性、完整性、及时性本站不作任何保证或承诺,请读者仅作参考,并请自行核实相关内容!
相关阅读
- AGV与RGV的技术对比2021-04-29
- 浅谈AGV小车市场及其导航和传感器技术应用2020-09-27
- AGV小车的激光雷达安装位置修正方法2019-09-24
- 多点稳固结构的AGV小车驱动及转向系统2019-09-24
- AGV模式的堆垛机的AGV模块2019-09-20