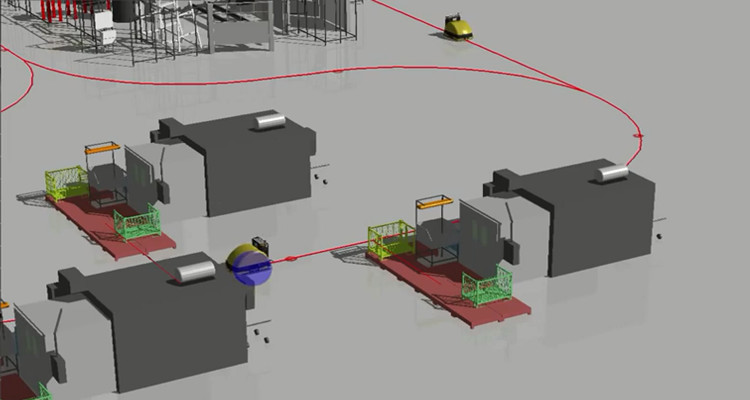
基于路径分析的AGV小车交通管制调控方法
基于路径分析的AGV小车交通管制调控方法:S1、将工作区划分为x个检测区域并设置多个停靠点;S2、将下发至AGV小车的运输任务与对应的AGV小车的实时位置关联并存储;S3、获取每一个运行的AGV小车的运输任务的个数、运行路径种类以及路径长度;S4、根据每一个运行的AGV小车的运输任务的个数、运行路径种类以及路径长度调整运行的AGV小车是否进入对应的检测区域内最近的停靠点。本发明并通过分析每一个AGV小车任务的紧急性以及每一个AGV小车返回路径的类型和长度来动态选择停靠让行的AGV小车,避免多个AGV小车之间存在路径重叠而造成交通隐患的问题,保证工作区内AGV小车的顺畅通行。
本文地址:http://www.agvbaike.com/agvyy/2019-09-25/6791.html
agv
AGV知识
AGV资料
AGV资讯
AGV技术
AGV应用
AGV方案
仓储机器人
免责声明:本文引自厂商或其他媒体,与AGV百科网无关。其原创性以及文中陈述文字和内容未经本站证实,对本文以及其中全部或者部分内容、文字的真实性、完整性、及时性本站不作任何保证或承诺,请读者仅作参考,并请自行核实相关内容!
相关阅读
- 基于路径分析的AGV小车交通管制调控方法2019-09-25
- 自动导引小车AGV的路径寻优方法2019-09-20
- AGV车载平台的码垛机器人2019-09-19
- 智能堆垛技术与AGV相结合,拣选效率能提升40%!2019-09-12
- 怎么设置AGV的路线与调度方法?2017-12-20