agv磁导航传感器调度指令的适用性
agv磁导航传感器调度指令的适用性
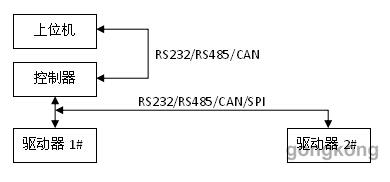
(1)AGV 接受上位调度计算机下达的任务指令是根据空车等待时间的先后排队顺序依次分配 。比较适用于电磁导 引 、 磁带导引 、光学导引、点导引 AGV 系统。
(2)随机分配
AGV 接受上位调度计算机下达的任务指令是根据在所有等待的空车中随机分配。比较适用于激光导引、惯性导引 AGV 系统。
(3)优化分配
AGV 接受上位调度计算机下达的任务指令是先根据某一空车当前所在位置距任务目标点的距离最近来进行预
分配 ,并在此过程中如果又有更近的空车产生, 则系统会自动重新更改指令 ,最终将任务转给最近的 AGV 去执行。比较适用于激光导引、惯性导引 AGV 系统。
(4)特殊分配
AGV 接受上位调度计算机下达的任务指令是根据时间、任务 、条件等的优先级,按需求进行转换调整进行分配。比较适用于激光导引、惯性导引 AGV 系统。
本文地址:/agvzhishi/5169.html
agv
AGV知识
AGV资料
AGV资讯
AGV技术
AGV应用
AGV方案
仓储机器人
免责声明:本文引自厂商或其他媒体,与AGV百科网无关。其原创性以及文中陈述文字和内容未经本站证实,对本文以及其中全部或者部分内容、文字的真实性、完整性、及时性本站不作任何保证或承诺,请读者仅作参考,并请自行核实相关内容!
相关阅读
- AGV仓储机器人回转驱动装置2019-09-25
- 用于AGV防爆小车行走轮毂系统2019-09-24
- AGV小车避震悬挂装置介绍2019-09-20
- 物联网的智能工厂AGV自动运输平台2019-09-20
- 智能仓储机器人及其工作方法2019-09-19












.jpg)