惯性导航AGV原理详解
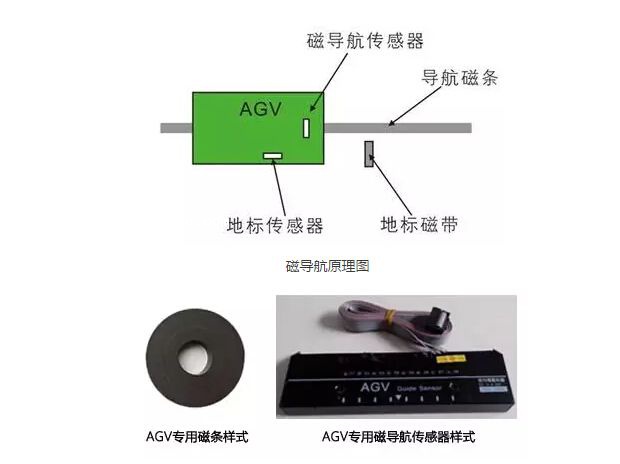
首先给大家介绍一下常见的磁导航AGV,其优势是价格相对来说比较便宜,投资回报快,适合相对固定路径以及工艺流程,物理定位稳定性高,其缺点是对于太复杂的工艺和灵活性相对逊色,对于复杂的线路,地面铺满交错的磁条路线,看起来就不是很美观了。
随着技术的进步,工厂柔性生产趋势,用户对一部分复杂应用场景考虑使用调度更灵活,本地运算能力更加强大,系统扩展性和网络化更高的无轨导航AGV小车,代表技术有激光导航AGV和惯性导航AGV等。
惯性导航AGV其定位技术以及运动控制技术门槛不高。惯性导航系统由单片机、陀螺仪、加速传感器等零件组成,性能由传感器噪声、校准信标(二维码或其它)决定,其陀螺芯片本身特性累积误差(随时间增长误差会累积增大,30~60秒误差1°)的绝对硬伤,对于室内高精度毫米级定位误差本身就不适用。
惯性导航AGV原理:
不要小看小小1°误差被距离放大后与既定目的地就差之千里了,故此需要每走1米左右读取二维码进行位置校准归零并作为位置信息上传(AGV行走在二维码与二维码之间的位置信息是通过时间和速度简单模拟出来,而非实际真实坐标)。
本文地址:http://www.agvbaike.com/AGVjishu/2017-11-30/6726.html
agv
AGV知识
AGV资料
AGV资讯
AGV技术
AGV应用
AGV方案
仓储机器人
免责声明:本文引自厂商或其他媒体,与AGV百科网无关。其原创性以及文中陈述文字和内容未经本站证实,对本文以及其中全部或者部分内容、文字的真实性、完整性、及时性本站不作任何保证或承诺,请读者仅作参考,并请自行核实相关内容!
相关阅读
- AGV与RGV的技术对比2021-04-29
- 浅谈AGV小车市场及其导航和传感器技术应用2020-09-27
- AGV小车的激光雷达安装位置修正方法2019-09-24
- 多点稳固结构的AGV小车驱动及转向系统2019-09-24
- AGV模式的堆垛机的AGV模块2019-09-20