浅谈AGV视觉导航系统的原理
视觉导航又叫做图像识别导航,它分为两种方式:一种是有线式,另一种是无线式。无线式的视觉导航技术是利用CCD在系统动态时摄取周围环境的相应的图像资料,并与设定的运行路径在信息数据库中进行比对,进而确定AGV当前地位置,经过控制模块对小车的运行路径进行实时的决策。
另一种有线式视觉导航技术是根据AGV现场的具体地面或者路边明显路标,经过车载的摄像装置(CCD)动态地获取路边的图像,再经过车载的计算机进行相应的处理,进而识别出路径的相应标识线,并且判断AGV与期望标识线的距离和与标识线的夹角,进而通过驱动系统控制AGV的实际行驶路径在与期望的路经保持在允许的范围内即可。
有线视觉导航技术的优点是:可以获取较大容量的信息、具体路径的设置与变化比较简单、系统具有较好的柔性等,而且具有现实应用的可行性和比较广阔的前景,是现今AGV的先进的导航技术和重要发展方向。车载摄像装置主要是由CCD摄像机、图像采集卡、光源等设备组成。
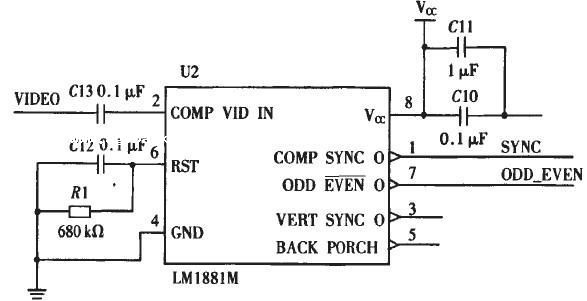
摄像头采集电路图
在视觉系统启动后,AGV的车载CCD摄像机就对小车前方的路径进行相应的图像采集,经过图像采集卡后,经过处理后送到相应的上位计算机。
AGV的上位计算机经过对地面的信息进行适当图像处理(主要包括阈值处理、掩膜、直方图分析、图像分割、边缘检测、区域增长)与图象分析(主要包括特征摄取、物体识别、位置大小和方向以及图像其它物理特征的分析和较深度的信息处理),进而形成相应的控制指令,再传到车载计算机(单片机),进而控制AGV的相应的动作。
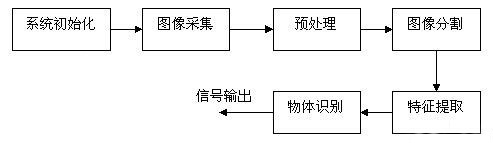
视觉系统的工作原理的示意图
本文地址:/agvyy/2017-06-09/6563.html
agv
AGV知识
AGV资料
AGV资讯
AGV技术
AGV应用
AGV方案
仓储机器人
免责声明:本文引自厂商或其他媒体,与AGV百科网无关。其原创性以及文中陈述文字和内容未经本站证实,对本文以及其中全部或者部分内容、文字的真实性、完整性、及时性本站不作任何保证或承诺,请读者仅作参考,并请自行核实相关内容!
相关阅读
- 基于路径分析的AGV小车交通管制调控方法2019-09-25
- 自动导引小车AGV的路径寻优方法2019-09-20
- AGV车载平台的码垛机器人2019-09-19
- 智能堆垛技术与AGV相结合,拣选效率能提升40%!2019-09-12
- 怎么设置AGV的路线与调度方法?2017-12-20