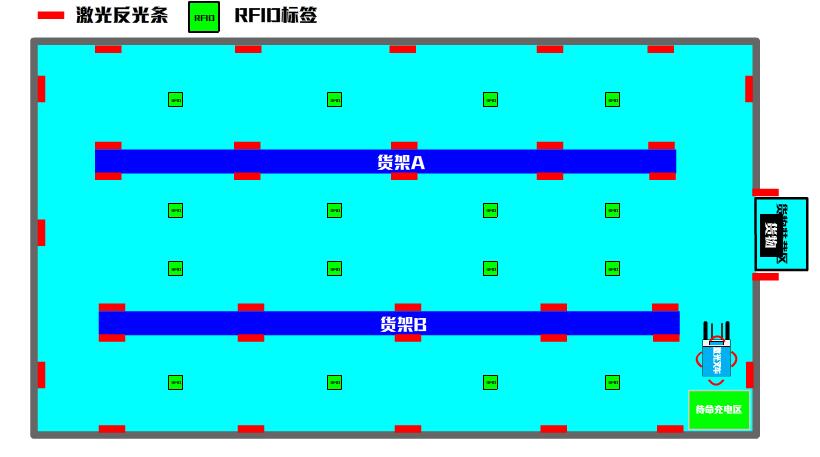
AGV自动搬运机器人红外传感器寻迹原理
利用地面颜色与色带颜色的反差,在明亮的地面上用黑色色带,在黑暗的地面上用白色色带。导引车的下面装有光源,用以照射色带。由色带反射回来的光线由光学检测器(传感器)接受,经过检测和运算回路进行计算,将计算结果传至驱动回路,由驱动回路控制驱动系统工作。
当AGV偏离导引路径时,传感器检测到的亮度不同,经过运算回路计算出相应的偏差值,然后由控制回路对AGV的运行状态进行及时修正,使其回到导引路径上来。因此,AGV能够始终沿着色带的导引轨迹运行。红外反射式光电传感器,包括一个可以发射红外光的固态发光二极管和一个用作接收器的固态光敏二极管(或光敏三极管)。
本文地址:/agvzhishi/2016-11-05/6333.html
agv
AGV知识
AGV资料
AGV资讯
AGV技术
AGV应用
AGV方案
仓储机器人
免责声明:本文引自厂商或其他媒体,与AGV百科网无关。其原创性以及文中陈述文字和内容未经本站证实,对本文以及其中全部或者部分内容、文字的真实性、完整性、及时性本站不作任何保证或承诺,请读者仅作参考,并请自行核实相关内容!
相关阅读
- AGV仓储机器人回转驱动装置2019-09-25
- 用于AGV防爆小车行走轮毂系统2019-09-24
- AGV小车避震悬挂装置介绍2019-09-20
- 物联网的智能工厂AGV自动运输平台2019-09-20
- 智能仓储机器人及其工作方法2019-09-19