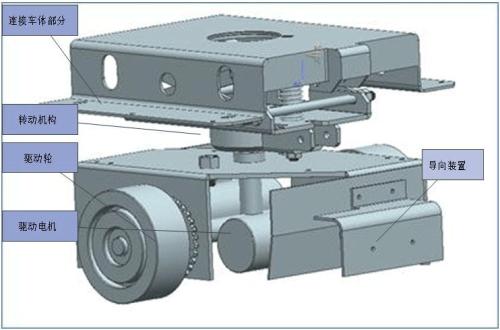
激光引导agv小车激光定位
在整个AGV系统中,AGV导引技术(即动态跟踪定位技术)是最主要的核心技术,其中导引技术包含导航技术和指引技术.导航的作用是确定和向主站报告.AGV小车当前的位置.从而保持agv小车的位置.指引的作用是根据主站发送的控制指令和agv小车的估计位置明确agv小车的导引角度.速度以及运行路线.
激光定位算法在agv技术应用中是非常重要的,激光导引AGV小车采用激光扫描器和预先在AGV小车运行区域周围布置好位置的反光板作为激光 定位算法计算所需的基础环境.激光导引agv小车的导航系统有静态位置计算模式和在运动状态下持续动态位置的计算两种位置计算模式.
agv小车静态位置计算模式.当agv小车第一次进入系统.agv小车的当前位置不知道时,要进行初始化的位置计算,通过比较一些已知反光板的已知方位.小车控制器中的导航模块能计算出小车的位置.小车静止.激光扫描器能找到至少三个反光板的方位,反光板的位置已知.最后知道的位置优先.如在激光扫描器旋转一周中捕捉到的小车的方位与最后知道的期望的方位相匹配.则这个位置就可作为当前位置.如果如果存储最后知道的位置或匹配发生错误.则采取下面的定位方法.激光扫描器旋转一圈,三个分布较好的方位被选择,通过计算可确定出小车在坐标系统中的位置.如位置正确.则余下的大部分可测量的方位与已知的反光板相匹配
本文地址:/agvzhishi/2016-11-05/6348.html
agv
AGV知识
AGV资料
AGV资讯
AGV技术
AGV应用
AGV方案
仓储机器人
免责声明:本文引自厂商或其他媒体,与AGV百科网无关。其原创性以及文中陈述文字和内容未经本站证实,对本文以及其中全部或者部分内容、文字的真实性、完整性、及时性本站不作任何保证或承诺,请读者仅作参考,并请自行核实相关内容!
相关阅读
- AGV仓储机器人回转驱动装置2019-09-25
- 用于AGV防爆小车行走轮毂系统2019-09-24
- AGV小车避震悬挂装置介绍2019-09-20
- 物联网的智能工厂AGV自动运输平台2019-09-20
- 智能仓储机器人及其工作方法2019-09-19