工业4.0将抛弃传统AGV
工业4.0是德国提出的战略计划,继而影响到全球工业向智能化推进,所以关于工业4.0的未来,欧洲人最有发言权,也是近期,欧洲多方工业杂志媒体,提出工业4.0将抛弃传统AGV的文章和评论,但是句句有理,值得深思,值得国内AGV企业参考对AGV发展未来的规划。

讨论指出
智能化自动驾驶车辆随着十几年的技术发展,现在已经迎来了一个驶入生产中心的契机,这些自动驾驶车辆的进入,也将完全替代掉现有的传统AGV。
第一台AGV是在19世纪50年代产生的,已经经过了半个多世纪的发展,从无线电导引到磁带导引及别的形式的导引,但缓慢的发展进程,并不是限制AGV使用的唯一原因。AGV是一种固定的、动作慢的、独立的、适应性差的机器,它要在当今复杂繁忙的工业领域里使用还存在很多不可接受的缺点
AGV中国
固定不灵活
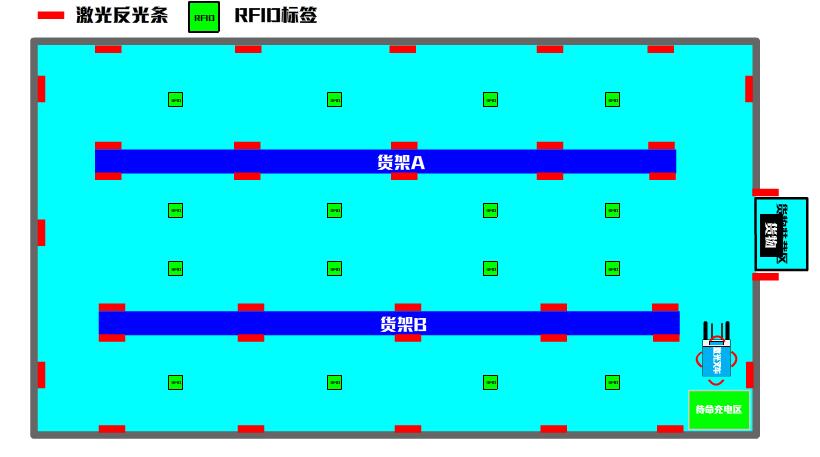
AGV遵循一定的路径,特别是像磁条导航AGV,但即使像激光导航AGV,也很难有使用者轻易且直观地改变它的形式路径。虽然AGV在固定的点与点直接往复运输是没有问题的,但动态的路径规划,对工业4.0来说确实不可缺少的,特别是在当今日益复杂的生产环境中。
迟钝不敏捷
AGV在生产环境中运行遵循一定的轨迹,却又不能像火车一样,在特定的轨道上不受干扰,但现在的AGV在受到干扰时要么就停下来,要么就由于躲避不及时而装上去,它们没有办法避开突然出现的障碍而继续前进,同时也很难处理路径重叠的AGV的优先级。
独立而不协作

AGV遵循受控的路径,并且被预编程,它们没有办法很好的进行协作工作,因为它们随时可能因为意外的问题,而打断协作的预编程程序,这将会导致一系列混乱,它们由于受限与预编程的程序,而无法动态地与其他设备协调,被各自的任务所控制,无法轻易改变。
适应性差
AGV在任何一个生产中心使用,都必须安装这个厂区进行重新设计和规划,AGV不能像一般的企业资源在工厂里的任意场合进行调度和分配,它们的预编程设定使得它们无法适应新的环境,同时使用AGV需要对现有厂区做一系列的改造,这在繁忙的场合是不能接受的,因为没有时间停下来让你改造厂区。本文转载于:AGV中国
本文地址:/AGVnews/2016-11-12/6415.html
agv
AGV知识
AGV资料
AGV资讯
AGV技术
AGV应用
AGV方案
仓储机器人
免责声明:本文引自厂商或其他媒体,与AGV百科网无关。其原创性以及文中陈述文字和内容未经本站证实,对本文以及其中全部或者部分内容、文字的真实性、完整性、及时性本站不作任何保证或承诺,请读者仅作参考,并请自行核实相关内容!
相关阅读
- 一文读懂业内大热的高举升叉车AGV2022-10-26
- 投资回收期最多3年,AGV机器人让电商仓效率提升1.5倍2022-10-26
- AGV企业如何在“内卷”中走向“新生”2022-10-26
- 观察|自主移动机器人为何兴起,AGV、AMR趋势如何?2022-10-26
- 聚势赋能 深圳工业展(ITES)今日开幕2021-04-29