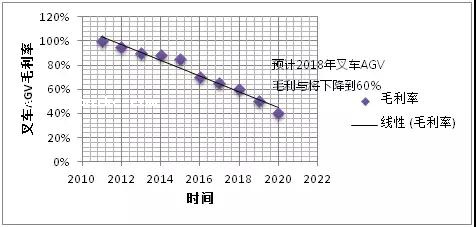
AGVЧ§ЖЏЯЕЭГЪ§бЇФЃаЭЕФНЈСЂ
ЁЁЁЁAGVЧ§ЖЏЯЕЭГЕФЪ§бЇФЃаЭУшЪізХМЦЫуЛњD/AЪфГіжЕ(МДЕчбЙжЕ)КЭЧ§ЖЏТжзЊЫйжЎМфЕФЙиЯЕЃЌЩшМЦздЖЏЕМв§ПижЦЦїМАНјааЗТецКЭЪдбщбаОПЖМашвЊНЈСЂФмЙЛе§ШЗЕиЗДгГГЕСОЧ§ЖЏЯЕЭГЬиадЕФЪ§бЇФЃаЭЁЃ
ЁЁЁЁЫцзХAGVЯЕЭГБцЪЖРэТлгыЗНЗЈЕФЗЂеЙЃЌгІгУЯЕЭГБцЪЖЕФЗНЗЈЃЌЭЈЙ§ЪЕбщбаОПРДШЗЖЈЯЕЭГЕФЪ§бЇФЃаЭЃЌЪЧвЛжжФмТњзуЩЯЪівЊЧѓЕФаажЎгааЇЕФЭООЖЁЃ
ЁЁЁЁЮЊСЫЖдЧ§ЖЏЯЕЭГЖЏЬЌЬиадНјааГѕВНЗжЮіВЂБугквдКѓЕФЯЕЭГБцЪЖЃЌашвЊЪзЯШЭЈЙ§ЖдЦфНјааЬиЖЈЕФЪфШыаХКХ(ШчНздОЪфШы)ЯТЕФЖЏЬЌЯьгІЙ§ГЬЪдбщЃЌДгЖјПЩвдИљОнЪдбщНсЙћХаЖЯГіЧ§ЖЏЯЕЭГФЃаЭЕФНзДЮЁЃСэЭтЃЌгЩгкЪфШыЪфГіаХКХОљЮЊРыЩЂЪ§зжаХКХЃЌвђДЫвЫВЩгУВюЗжЗНГЬУшЪіИУЯЕЭГЁЃ
ЁЁЁЁгУВюЗжЗНГЬЖЈСПУшЪівЛИіЖЏЬЌЯЕЭГЪБЃЌБиаыШЗЖЈГіЗНГЬжаЕФгаЙиВЮЪ§ЁЃЫљвдЃЌИУжжЯЕЭГБцЪЖЕФЪЕжЪЪЧвЛИіВЮЪ§ЙРМЦЮЪЬтЃЌПЩЪгЮЊвЛжжЛвЯфЪНВПЗжБцЪЖЮЪЬтЃЌЭЌЪБЃЌБцЪЖЙ§ГЬжагЩгкЪфШыЪфГіЪ§ОнЪмЕНдыЩљЕФгАЯьЃЌвЛАугІПДГЩЪЧЫцЛњБфСПЃЌвђДЫвВЪєгкЭГМЦбЇЗЖГыЁЃ
ЁЁЁЁдкВЮЪ§ЙРМЦЪБЃЌСІЧѓЪЙФГвЛИіБЛЪЪЕБЖЈвхЕФЮѓВюБъзМЧїгкзюаЁЃЌвдБуЪЙбАЧѓЕФЪ§бЇФЃаЭгыЪдбщЪ§ОнгазюМбФтКЯЁЃдкИїжжВЮЪ§ЙРМЦММЪѕжаЃЌзюаЁЖўГЫЗЈЪЧДгЪдбщЪ§ОнНјааВЮЪ§ЙРМЦЕФжївЊЪжЖЮЃЌЦфЛёЕУЕФЙРМЦдквЛЖЈЬѕМўЯТОпгазюМбЕФЭГМЦЬиадЃЌвђДЫИУЗНЗЈБЛЙуЗКгІгУгкЯЕЭГБцЪЖбаОПжаЁЃ
ЁЁЁЁдкЯЕЭГБцЪЖжаЃЌЪфШыаХКХЕФРрБ№КЭаЮЪНгАЯьзХЫљВЩгУЕФБцЪЖЗНЗЈКЭБцЪЖОЋЖШЁЃгУгкБцЪЖЪфШыаХКХЕФзюЕЭвЊЧѓЪЧОпгаГжајМЄРјЬиадЃЌМДдкећИіЙлВтжмЦкЩЯЃЌЙ§ГЬЕФЫљгаФЃЬЌБиаыБЛЪфШыаХКХГжајМЄРјЁЃетвтЮЖзХЪфШыаХКХВЛФмЫцвтбЁдёЃЌЗёдђВЛЕЋБцЪЖОЋЖШВЛФмБЃжЄЃЌЩѕжСПЩФмдьГЩВЛПЩБцЪЖЁЃФПЧАГЃгУЕФаХКХжївЊЪЧЫцЛњађСа(ШчАздыЩљ)КЭЮБЫцЛњађСаЁЃ
ЁЁЁЁРэТлЗжЮіБэУїЃЌбЁгУАздыЩљзїЮЊБцЪЖЪфШыаХКХПЩвдБЃжЄЛёЕУНЯКУЕФБцЪЖаЇЙћЃЌЕЋЪЧАздыЩљдкЙЄГЬЩЯВЛвзЪЕЯжЃЌвђДЫЙЄГЬжавЛАубЁгУзюГЄЯпадвЦЮЛМФДцЦїађСа(МђГЦMађСа)зїЮЊБцЪЖЪфШыаХКХЁЃMађСаЪЧЖўНјжЦЮБЫцЛњТыађСа(PRBS)ЕФвЛжжаЮЪНЃЌЫќЕФздЯрЙиКЏЪ§НгНќТіГхКЏЪ§ЃЌОпгаНќЫЦАздыЩљЕФаджЪЃЌПЩБЃжЄгаНЯКУЕФБцЪЖОЋЖШЁЃ
ЁЁЁЁЩюлкЪаХЗюјЛњЦїШЫгаЯоЙЋЫОЃЌЪЧЙњФкЖЅМтЕФЙЄвЕAGVаЁГЕжЦдьЩЬжЎвЛЃЌвВЪЧШЋЧђЯњСПзюДѓЕФЮоШЫАсдЫГЕЩњВњГЇМвЃЌгЕгазджїжЊЪЖВњШЈКЭКЫаФММЪѕЕФИпаТММЪѕЦѓвЕЁЃЖрФъРДЃЌХЗюјЛњЦїШЫвЛжБжТСІгкЛњЦїШЫЕФбаЗЂЁЂЩњВњЁЂЯњЪлЃЌЪЧжаЙњжЧФмagvаЁГЕЕФПЊДДепгыСьЕМепЃЌЮЊЙЄГЇЁЂЙКЮяжааФЁЂАьЙЋГЁЫљЕШЗўЮёаавЕЬсЙЉжЧФмAGVвЛЬхЛЏНтОіЗНАИЁЃ
БОЮФЕижЗЃКhttp://www.agvbaike.com/agvziliao/2017-11-28/6705.html
agv
AGVжЊЪЖ
AGVзЪСЯ
AGVзЪбЖ
AGVММЪѕ
AGVгІгУ
AGVЗНАИ
ВжДЂЛњЦїШЫ
Утд№ЩљУїЃКБОЮФв§здГЇЩЬЛђЦфЫћУНЬхЃЌгыAGVАйПЦЭјЮоЙиЁЃЦфдДДадвдМАЮФжаГТЪіЮФзжКЭФкШнЮДОБОеОжЄЪЕЃЌЖдБОЮФвдМАЦфжаШЋВПЛђепВПЗжФкШнЁЂЮФзжЕФецЪЕадЁЂЭъећадЁЂМАЪБадБОеОВЛзїШЮКЮБЃжЄЛђГаХЕЃЌЧыЖСепНізїВЮПМЃЌВЂЧыздааКЫЪЕЯрЙиФкШн!
ЯрЙидФЖС
- AGVаЁГЕТЗОЖЙцЛЎжЧФмЕїПиЯЕЭГ2019-09-25
- здЖЏЧаЛЛТжзгЕФжЧФмГЕЕзХЬМАAGVЬЈГЕ2019-09-20
- AGVаЁГЕздЪЪгІЕМКНЗНЗЈМАЯЕЭГ2019-09-19
- AGVЪѕгяДѓШЋ2017-11-28
- AGVЧ§ЖЏЯЕЭГЪ§бЇФЃаЭЕФНЈСЂ2017-11-28