激光AGV叉车在电子电器行业的仓库应用(2)

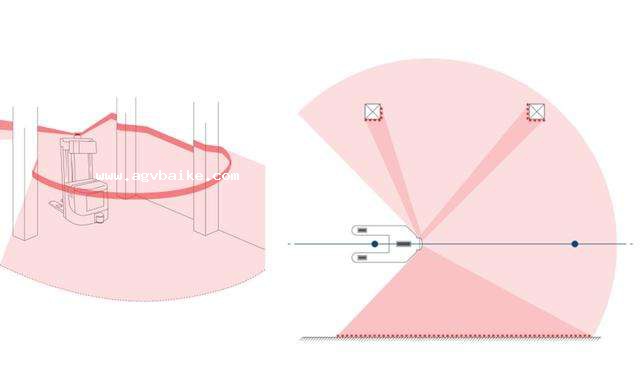
1). 本案例采用激光叉车,采用激光引导,无需在地面上进行磁条施工,更加灵活。
2). 激光叉车,可以单机离线运行,也可以配合控制系统,多机联网进行,更加强大,灵活。便捷式电池仓设计,更换电池更快捷,而且可以选择安装自动充电桩,自动充电更省心。
3). 激光叉车载重量大,最大承载力可达2吨以上举升高度最高可达4米以上。
4).在安全方面采用我们采用扇面的红外感应安全、基于汽车保险杠原理的防撞机械限位停止装置、智久AGV调度系统软件防护构成的业界首创三重保护,更加安全可靠。
5 ) .本方案采用的智久激光叉车可通过地面上贴附的RFID标签正确的判断何时何处停车,也能通过此功能判断叉车的位置!RFID或二维码定位停车技术,通过定位停车技术和可靠地制动技术,使停车精度小于20mm。工装的容错设计,可以使操作人员更方便的装卸货物,提高了系统的可靠性。
2、调度系统

1).我司自主研发的MCU控制卡,是为适应较复杂的AGV运行路线、为避免多台AGV因为路径(主要在路线交叉口)而发生冲突的现象来设计的。该功能就像红绿灯的功能一样,只不过AGV之间是通过无线通讯进行互相管制的,该功能的出现解决了生产物流系统中多台AGV通过路线交叉口时发生“打架”的现象,使AGV在生产物流系统中的运用更加顺畅、更加人性化、自动化和无人化。
2) .本案例中采用自主研发的交通管制系统与RFID标签定位相配合,合理的规划多辆小车运行路线。智久激光叉车每经过一个RFID卡时,都会给系统发送信息,系统根据各激光叉车发回的信息,对激光叉车所在的位置进行区间判断,当通过一个路口时,如果前方路口已有激光叉车已经进入路口区间,那么后来的激光叉车将会受到系统的停车等待指令,当前车通过障碍解除后,后来的激光叉车再继续行驶。 调度系统也会通过激光叉车发回来的位置信息,对激光叉车进行合理分配任务,避免激光叉车打架的情况,使得多辆激光叉车在同一个环境下,互不干扰的情况下对准确无误的执行任务。
本文地址:/AGVfa/2016-11-02/6332.html
agv
AGV知识
AGV资料
AGV资讯
AGV技术
AGV应用
AGV方案
仓储机器人
免责声明:本文引自厂商或其他媒体,与AGV百科网无关。其原创性以及文中陈述文字和内容未经本站证实,对本文以及其中全部或者部分内容、文字的真实性、完整性、及时性本站不作任何保证或承诺,请读者仅作参考,并请自行核实相关内容!
相关阅读
- 116台AGV助力海马第三工厂智能化物流搬运2019-09-12
- AGV在自动配方生产线的运用2019-06-12
- AGV提升企业物流搬运更具智能化2017-12-05
- 买AGV小车的三大理由,你值得选择!2017-12-05
- 选购AGV机器人要注意以下因素2017-11-30