高效、灵活的AGV系统在汽车总装生产线应用
自动导引车(AGV)是一种无人驾驶的、可以按照预先设定路径和程序进行自主移动的,实现某种特定货物移载或运输的移动式机器人。我国的AGV技术发展迅速,从20世纪90年代初开始进行产业化并逐步应用到各行各业中,现已具备一定规模,并出口至欧美等发达国家。本文主要介绍了我国自主技术产权的AGV系统在国外某大型汽车厂的应用。
项目简介
根据用户招标技术要求,沈阳新松机器人自动化股份有限公司(以下简称为“沈阳新松”)承建在国外某地新建汽车装配生产线的AGV系统,用AGV实现汽车底盘零部件分装工艺的工位间顺序运输及动态合装装配工艺。对于AGV的基本要求为磁信号导航,电池供电,每台AGV设备配备二套提升机系统,同时工作于汽车发动机及后桥部件,并可以适时进行举升间协同和独立工作,同时整车具备动态跟踪汽车外身的装配能力。整套生产环线产能超过每小时60台汽车的装配能力。AGV在汽车总装线上的应用如图1所示。
难点在于该系统较为庞大和复杂,AGV的数量多、运行区域广且生产节拍快,而且与外围系统有着复杂的交互和互锁,对项目承建商有着较高的要求和挑战。

图1AGV在汽车总装线上
系统设计
1.AGV车体
AGV车体(见图2)涵盖了机器人运动控制技术、动态跟踪技术、无线通信技术和导航技术等多学科综合性技术。

图2AGV车体
硬件配置
根据用户所要求的功能及可能发生的负载所需能力的计算,沈阳新松设计的AGV采用了集成转向双驱动单元底盘结构,使AGV车体具备前进、后退、转弯及侧移能力。同时,为了实现用户的装配工艺,沈阳新松在AGV车体上面安装了两套独立控制的提升机系统,使其根据工艺要求可以从控制逻辑上实现举升间的协同工作和独立工作。
电气设计方面,整车采用镍镉电池组供电,以实现AGV的快速在线充电和24h不间断运行能力。另外,根据功能要求,AGV车体上集成了导航传感器、动态跟踪传感器及各种传感器技术,使AGV在自主运动、导航跟踪和货物移载等方面具有完备的运动协调能力。
安全系统
由于AGV运行在人和设备共用的环境中,因此AGV的安全保护功能是用户比较注重的方面。为此,AGV车体上安装了急停按钮、非接触式激光防碰传感器和接触式安全装置,使AGV具备被动紧急停止和在遇到障碍时主动停车的能力。所选用的非接触式激光传感器属于EN61496-1/IEC61496-3标准三类设备,是国际上认证的可以用于非接触条件下对人体进行有效防护探测的安全设备。同时在AGV车体上增加了人体检测装置,当AGV在高速行走时如果有人踏上AGV车体,AGV会探测到并自动减速,从而减少发生人身伤害的可能性。
另外,沈阳新松在AGV控制逻辑和软件上设计了一些主动和被动安全措施。除不同运行情况下的声音和灯光示警外,还具备在异常情况下的保护,比如当AGV出离导航区域的保护和系统通信中断情况下的保护等,最大程度地保证了人车混合运行情况下的人身和设备安全。
经过仔细全面的安全性设计,AGV的整体设计满足了用户的风险性评估要求,得到了用户的高度评价。
功能配置
基于用户工艺的要求,并考虑到AGV设备的灵活性,沈阳新松将AGV的日常使用功能定位于自动运行模式和手动操作模式。
提升机系统作为AGV的车载设备,根据不同工位的工艺要求,将其分为双举升同步运行模式、半同步运行模式和独立模式。各种模式的切换和组合满足了生产环线的各工位的工艺要求。
沈阳新松在AGV试运行阶段与用户一同对设备操作的人性化和人体工程学进行了很详细的探讨,通过对AGV车载控制软件经过细节上的调整,与终端操作人员操作习惯达成最佳配合,从而提高了设备的使用效率。
2.控制台系统
控制台系统在AGV系统中处于中央调度和控制协调的位置,肩负着多AGV间的交通运行调度、AGV任务的下发、系统信号的汇总以及与外部现场系统的衔接等中枢任务。AGV系统环线布局如图3所示,AGV在汽车分装线上的应用如图4所示。
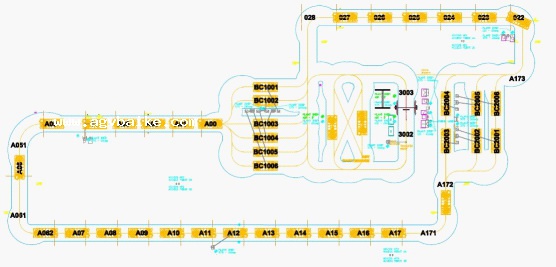
图3 AGV系统环线布局
通信子系统
通信系统是该系统中的一个重要组成部分。为了实现AGV的实时状态跟踪和AGV任务的及时下达,AGV与控制台之间保持着高频率的数据通信。由于AGV设备的物理工作范围较大,无线通信通常是AGV系统中较为普遍的选择。在该系统中,AGV与控制台之间的通信采用的是无线局域网式通信,在AGV所运行的整个空间内,架设了多组无线接入点,以便于AGV在运行时与控制台之间的数据通信达到无缝漫游。沈阳新松在系统设计时考虑到通信的重要性和冗余备份的需要,每一组无线接入点都进行了热备份设置,从根本上杜绝了通信设备个体故障可能导致的对生产的影响。
与现场设备的信号交互
在该系统中,AGV承担着汽车底盘零部件的分装工位间运输和合装的工作任务。对于每一个分装工位都要与地面设备进行交互,从而保证AGV能够满足各工位操作工人的工作需要。比如在汽车发动机及后桥吊装工位,AGV需要与外围吊具悬链进行交叉工作,因此AGV在工作过程中要根据设定好的信号交互逻辑,即不与其他设备发生干涉,又保证最高的工作效率。合装过程是AGV工作循环中和汽车装配中一个较为重要的步骤。合装装配是在动态过程中实现的,要求AGV跟踪处在高位的吊具上面的车体同步运行,在合装区域内辅助人工进行车体底盘与车体的装配。在此装配过程中AGV要与车体保持绝对的同步运行,以保证装配过程的绝对安全可控,与吊具悬链及合装工位信号的互锁是这个过程中的重要部分。

图4AGV在汽车分装线
与上级系统的通信和管理
作为汽车总装工艺过程中的一个子系统,AGV系统与上级系统的信号通信也是该项目的一个要求。在该项目中与AGV系统进行接口的系统由PLC来实现,为了保证AGV系统与其通信的兼容性和开放性,AGV系统采用了OPC方式与其进行通信。
在与上级系统的通信交互信息中,AGV的位置信息及车体状态信息是其所需要的,另外上级系统还控制着AGV进出各工位的使能和放行信号,为了保证AGV能够以最优的效率运行,沈阳新松在上级系统和AGV系统间建立了一套交通控制逻辑(见图5),从而保证AGV可以保持固定节拍速度连续不间断地经过各工装工位。
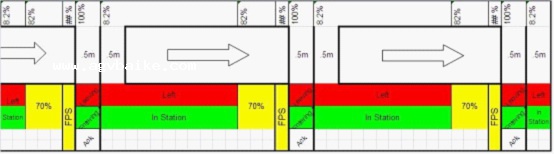
图5AGV与GEP通信交互
3.充电子系统
充电子系统在AGV系统中是一个重要的组成部分,充电子系统负责整个系统中AGV设备的电量补充,其系统内建充电机制直接关系着AGV系统是否能够正常运行以及汽车装配生产线能否正常运转。

图6AGV充电区
在该系统中,由于AGV数量较多,生产线较长,充电子系统采用了设立充电区(见图6)集中补充电量和定点装配工位部分补充电量的方法。根据AGV在系统中所消耗电量的计算和用户生产节拍及工艺情况,在AGV运行环线中设立了两个集中式充电区,以帮助AGV在进入分装区域和合装区域之前进行电量的集中补充,在较长的分装线上的定点装配工位增加了充电机以进行AGV的阶段电量补充。
结语
该项目经过细致有序的实施,已经成功应用在客户工厂内,每天承担着几百台汽车的生产任务,赢得了用户的好评。这是沈阳新松自主知识技术产权的AGV在海外的一次成功应用,它的应用扩大了我国AGV产品出口规模,加快了AGV产品出口的步伐,带动AGV产品出口到欧洲、美洲和亚洲的多个国家。
本文地址:/agvyy/2017-09-05/6621.html
agv
AGV知识
AGV资料
AGV资讯
AGV技术
AGV应用
AGV方案
仓储机器人
免责声明:本文引自厂商或其他媒体,与AGV百科网无关。其原创性以及文中陈述文字和内容未经本站证实,对本文以及其中全部或者部分内容、文字的真实性、完整性、及时性本站不作任何保证或承诺,请读者仅作参考,并请自行核实相关内容!
相关阅读
- 基于路径分析的AGV小车交通管制调控方法2019-09-25
- 自动导引小车AGV的路径寻优方法2019-09-20
- AGV车载平台的码垛机器人2019-09-19
- 智能堆垛技术与AGV相结合,拣选效率能提升40%!2019-09-12
- 怎么设置AGV的路线与调度方法?2017-12-20